ナーヴギアが欲しい
ATmega88p
mega88pのソース書きました
プログラム
プログラム
 mmb_program.zip
mmb_program.zip
エアー
サーボよりよっぽど便利じゃん!
これからはぜひサーボよりこっちを使おう!
これからはぜひサーボよりこっちを使おう!
簡単なメモ
エアタンクとして炭酸ペットボトルを使う
キャップにエアー用のホースをそのままつける
キャップに4m程度の穴をあけ、ホースを通し、接着剤で固定
こんな簡単なことで空気漏れない!!
エアタンクとして炭酸ペットボトルを使う
キャップにエアー用のホースをそのままつける
キャップに4m程度の穴をあけ、ホースを通し、接着剤で固定
こんな簡単なことで空気漏れない!!
つくばロボコン2013の報告書に詳細有
モータ
PWM周波数について
モータによってインダクタンスなどから
適切な周波数がわかるらしい
当たり前らしいけど自分にとっては新たな発見です。
適切な周波数がわかるらしい
当たり前らしいけど自分にとっては新たな発見です。
ARMマイコン
STM32-Discoovery に挑戦中
現在 シールド案作成
テスト中
のちのちシールド案を上げる・・・ かも
現在 シールド案作成
テスト中
のちのちシールド案を上げる・・・ かも
10月1日 追記
3.3VでモータドライバICが動く…
目が覚めました
もう少し周りをみて行動したい。。。
3.3VでモータドライバICが動く…
目が覚めました
もう少し周りをみて行動したい。。。
え…
レベル変換いらねーじゃん!!!
2013/12/30
シールド作成完了
発注した!!!!!!!!
シールド作成完了
発注した!!!!!!!!
回路図なり(自己満なのでミスあるかも eagle)
stm32f4-discovery.zip
ちなみに開発環境はCooCoxとやらを使ってます。
参考にさせていただきました
参考にさせていただきました
プログラミング
CooCox公式?
CooCox公式?
2014/1/24
回路に問題発覚!!
訂正中
回路に問題発覚!!
訂正中
2014/1/25
訂正完了
かなり汚くなった
どうしましょ
とりま うめさんと相談かなぁ
訂正完了
かなり汚くなった
どうしましょ
とりま うめさんと相談かなぁ
2014/1/28
うめさんと相談した結果、CMOSじゃなくてTTLのICを使おうと
いうことになった
回路を元に戻しました(笑)
うめさんと相談した結果、CMOSじゃなくてTTLのICを使おうと
いうことになった
回路を元に戻しました(笑)
2014/1/30
発注!(elecrow.com)
ついでにMMDも発注しました
発注!(elecrow.com)
ついでにMMDも発注しました
2014/2/24
届きました!
はんだ付けしてテストします~
届きました!
はんだ付けしてテストします~
ソフトのテスト中です
つくばチャレンジで使って様子見ます
なんかちょっと不安定な感じが否めない^^;
つくばチャレンジで使って様子見ます
なんかちょっと不安定な感じが否めない^^;
MMB
LEDつけたいなぁ
自作CNC
サ部屋にあった台形ねじ(田丸さんより)などを
使ってCNC自作してます~
そのうち続報あげます!
使ってCNC自作してます~
そのうち続報あげます!
続報ではないですが、結構前に完成しました。
加工範囲 420mm*420mm*100mm程度です。
加工範囲 420mm*420mm*100mm程度です。
アルミを削るくらいはできますが、
Z軸の強度が心配なのでそのうち補強します。
Z軸の強度が心配なのでそのうち補強します。
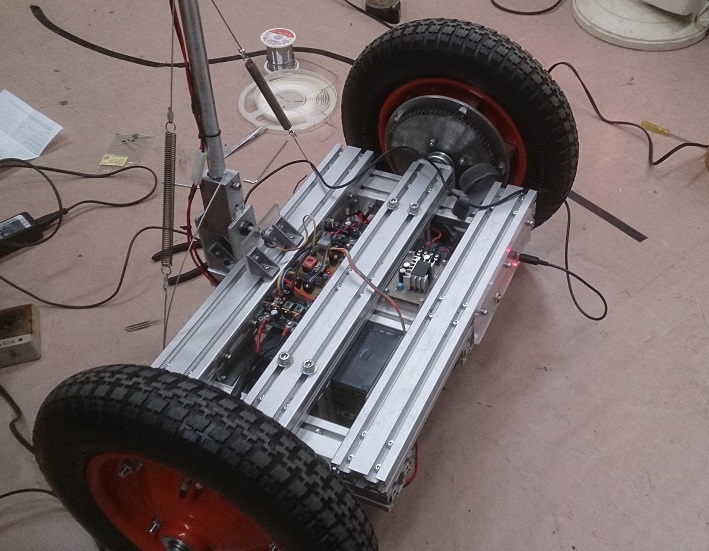
セグウェイ作りたい!
突然ですが。。。 できました(笑)
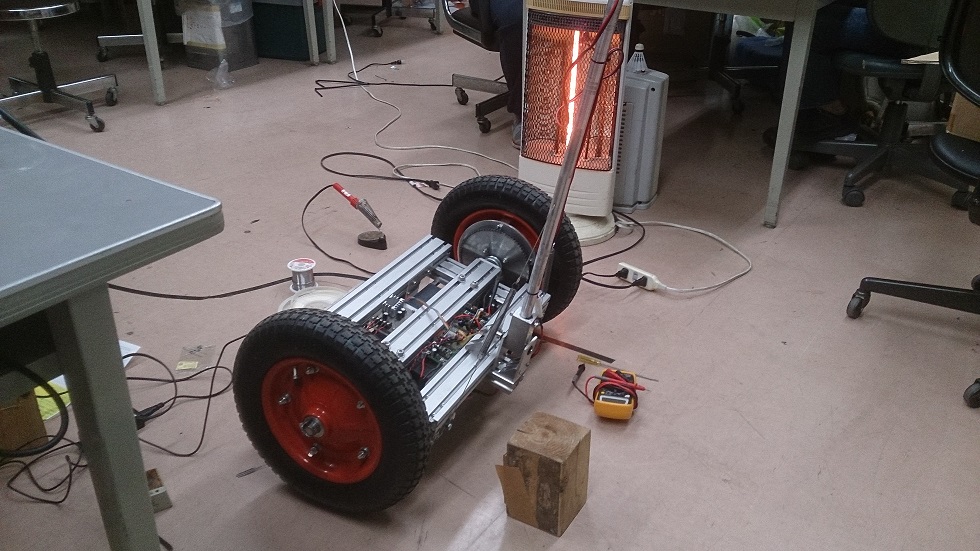
乗ってる様子

旋回しながら進むこともできます!
制御に関して
加速度センサとジャイロセンサを相補フィルタに
かけてやって、角度を推定してます。
角度に対してPD制御をして倒立してます。
エンコーダは使っていません!
人間のバランス感覚を鍛えることができます~
加速度センサとジャイロセンサを相補フィルタに
かけてやって、角度を推定してます。
角度に対してPD制御をして倒立してます。
エンコーダは使っていません!
人間のバランス感覚を鍛えることができます~
ACアダプタさすだけで充電もできるようにしてみました